En mode positionnement "simple"
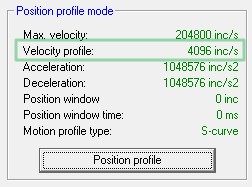
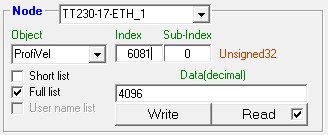
Vitesse du Profile : 
Renseigner la vitesse du déplacement 0x6081 ,Contrôler les accel et décel.
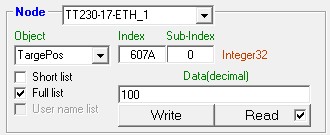
Position CIBLE : 
Renseigner la position cible 0x607A
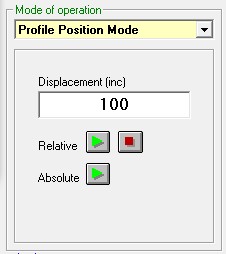
Lancer le mouvement : 
Commander le mouvement par le CONTROL WORD en passant de 0x0F à 0x1F
Arrêt rapide : 
Mettre le bit 2 à 0 dans le CONTROL WORD ( 0x1B en hexa )
