Following error
Position error threshold defines the position following error triggering threshold. It is important to correctly adjust
this value in order to get a good protection of the drive and the application.
The Position error threshold parameter can be adjusted like follows:
- Make the motor running with the required operation cycles and measure the maximum value of the following
error in the digital oscilloscope (max. following error value);
- Set then the Position error threshold parameter = 1.3 to 1.5 x Max. following error value.
The Position error detection mode defines the operation mode of the axis following error protection.
- When Absolute is selected, the following error protection is operating as described below:
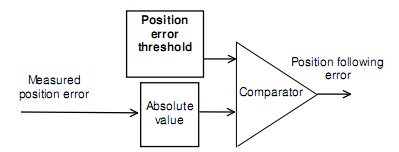
The measured position error value is continuously compared with the Position error threshold parameter value.
When the measured position error is exceeding the Position error threshold, the position following error is
released. This configuration is used for applications requiring the smallest possible following error.
- When Relative to dynamic model is selected, the following error protection is operating as described below:
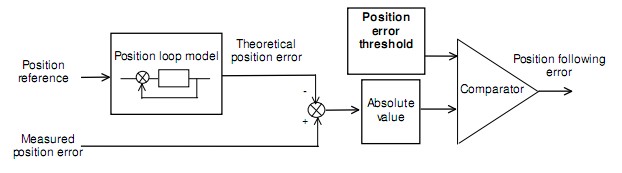
The measured position error value is continuously compared with the theoretical position error given by the
position loop model. When the difference is exceeding the Position error threshold, the position following error
is released. In this configuration, when the position servo loop is adjusted to get the motor position continuously
lagging the reference position (applications for positioning without overshoot and with a large following error
value), any small anomaly in the actuator behaviour can be detected.
